Lab & Field
Behind the Build
Started from zero as a complete beginner — raw frame parts, no experience, no playbook. Flashed ArduPilot, spent weeks tuning PID loops through trial, error, and hard crashes. Two years and multiple dev cycles later, the result was a highly reliable inspection platform: 45+ minute flight time, day/night vision cameras, live FHD video streaming to both the RPIC and a remote surveillance/command center, and proven stable in extreme heat (+45°C). From beginner to a drone that professionals could trust in the field.
.jpg)
.jpg)
.JPG)
.JPG)
.jpg)
.jpg)
.jpg)
What made this build special was that every frame part was designed and fabricated in-house — no off-the-shelf frame, just raw materials and iteration. Six motors gave single-motor-failure redundancy and the lifting capacity for an agriculture spray payload. Went through several design-build-test cycles before a successful spray trial was completed. A lesson in self-reliance and structural problem-solving under real agricultural field conditions.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.JPG)
University research putting embedded systems theory into practice — starting with breadboard Arduino circuits, building sensor networks, and testing communication protocols between nodes. This was also where C++ became a real tool: started learning it specifically to implement sensor data processing and streaming logic directly on the microcontroller. The BSc thesis was a fully practical implementation titled "Application of IoT Drone in Environment Monitoring" — a drone carrying onboard gas sensors to detect leaks around oil and gas refineries. Sensors connected to an Arduino unit that processed the readings and streamed them in real time to a remote monitoring system, giving ground operators continuous environmental awareness.
.jpg)
.jpg)
.jpg)
Designed and built an IoT-based vehicle speed enforcement system aimed at reducing speeding near schools and enforcing zone limits in personal cars. The concept: RF transmitters (tags) are placed at designated locations — when a vehicle enters a tagged zone, the onboard unit receives the tag ID, looks up the allowed speed limit stored for that zone, warns the driver, and automatically limits the vehicle's throttle if the limit is exceeded. Demoed on a small RC car with four tagged zones, each with a different speed limit. The vehicle controller read incoming tag IDs and responded in real time — autonomously. Filed as a patent for the system architecture and enforcement logic.
.JPG)
.jpg)
.jpg)
.jpg)
Tackled the most mechanically complex platform — a hybrid VTOL that takes off vertically then transitions to fixed-wing cruise. Sized the power system for a 4.5 kg airframe, and ran thrust-to-weight and motor efficiency tests on the bench before flight validation.
.jpg)
.jpg)
Crash damage, failed bearings, burnt motors — repairing drones teaches you more about how they work than building them. Disassembled frames to bare carbon, rewound motor coils, replaced ESC stacks, and rebuilt flight controllers. Each repair was a diagnostic exercise: read the failure, trace the cause, fix it right.
.jpg)
.jpg)
.jpg)
Built custom FPV racing drones to customer specifications at Dron-iq — frame selection, motor and prop pairing, ESC stack soldering, Foxeer camera and video transmitter installation, and Betaflight tuning tailored to each customer's flying style. Racing setups, freestyle rigs, and long-range configurations. Some builds were exhibited at UAS showcases. Production-level repeatability with hobbyist attention to detail.
.jpg)
.jpg)
.jpg)
.jpg)
.JPG)
Planned and executed a fixed-wing photogrammetry mission over the University of Kufa campus — setting up QGroundControl for automated grid mission planning, laying ground control points, and running two complete flights that captured 800+ images at calibrated overlap. Post-processed the full dataset in Drone Deploy, producing a 1.8 GB high-resolution orthomosaic map of the campus.
.JPG)
.JPG)
.JPG)
.jpg)
At Avianna (Lisle, Illinois — remote), served as both Drone Engineer and R&D Hardware Lead — owning the full hardware lifecycle for a custom professional UAS platform. Designed airframes, integrated avionics and sensor suites, and wrote PX4-based flight control integration code validated through SIH and hardware-in-the-loop (HIL) emulators. Coordinated with US headquarters on hardware specs and delivery milestones, and ran systematic flight experiments to optimize platform performance for mission requirements.
.jpg)
.jpg)
.jpg)
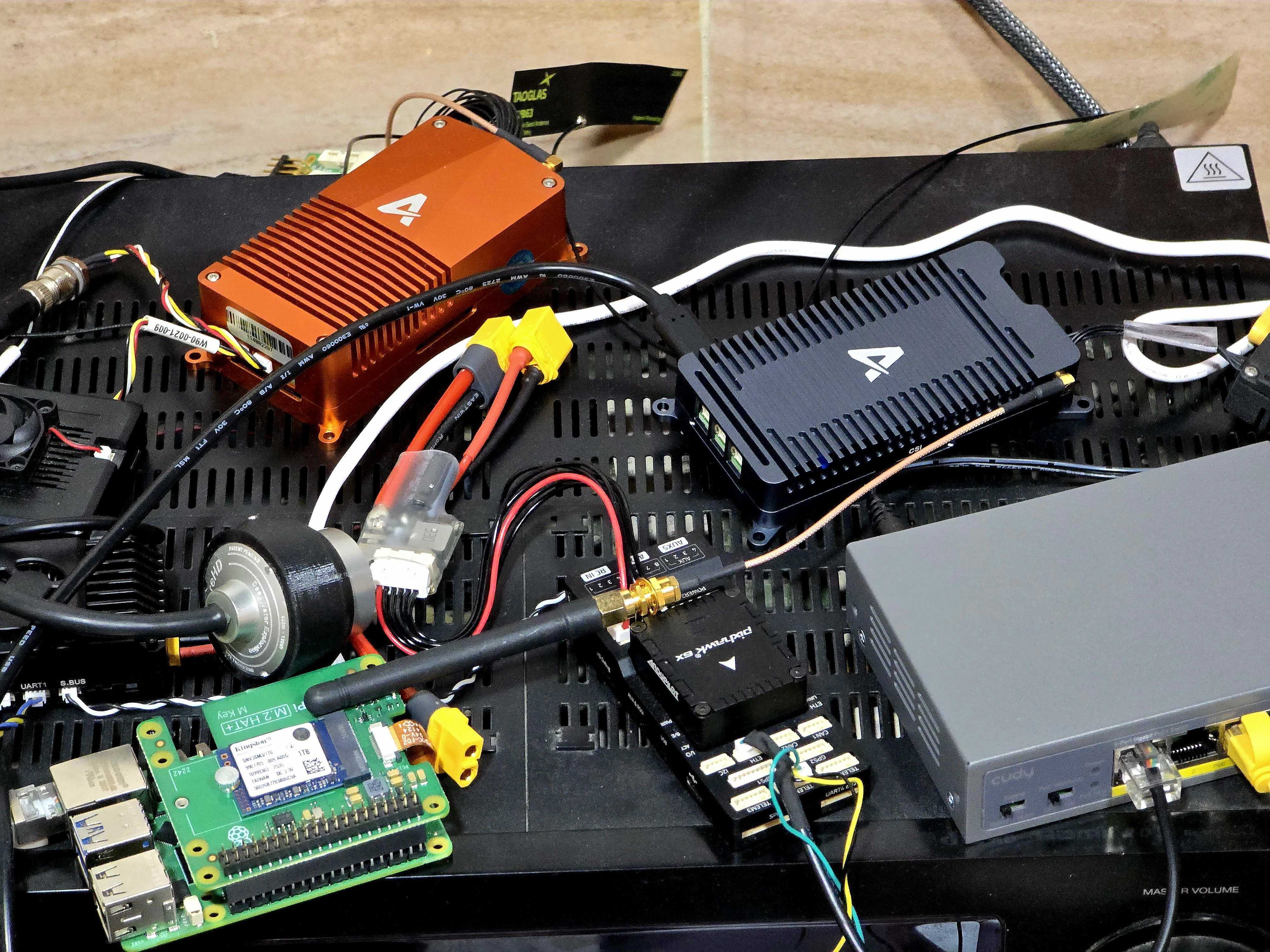
At LucidBots, owned the full software stack for the Sherpa industrial drone — PX4 firmware maintenance, autonomous flight app development using the Auterion SDK (C++), and hardware-software integration. Built a dedicated SIH test bench (Skynode X + Skynode Enterprise + motor controller) enabling complete software validation without a live aircraft. Separately, assembled a full Sherpa system replica — same flight stack, different propulsion system — a flying drone purpose-built for software testing in real flight conditions. Both setups together gave end-to-end coverage from sim to real flight. Delivered VertiClean autonomous facade cleaning, FPV recording pipeline, and firmware releases through v4.1.28-5.3.0.



Alongside hands-on engineering work, produced tutorial content covering drone building, PX4 configuration, FPV setup, and embedded systems topics — translating field experience into accessible guides for the broader UAS and robotics community.
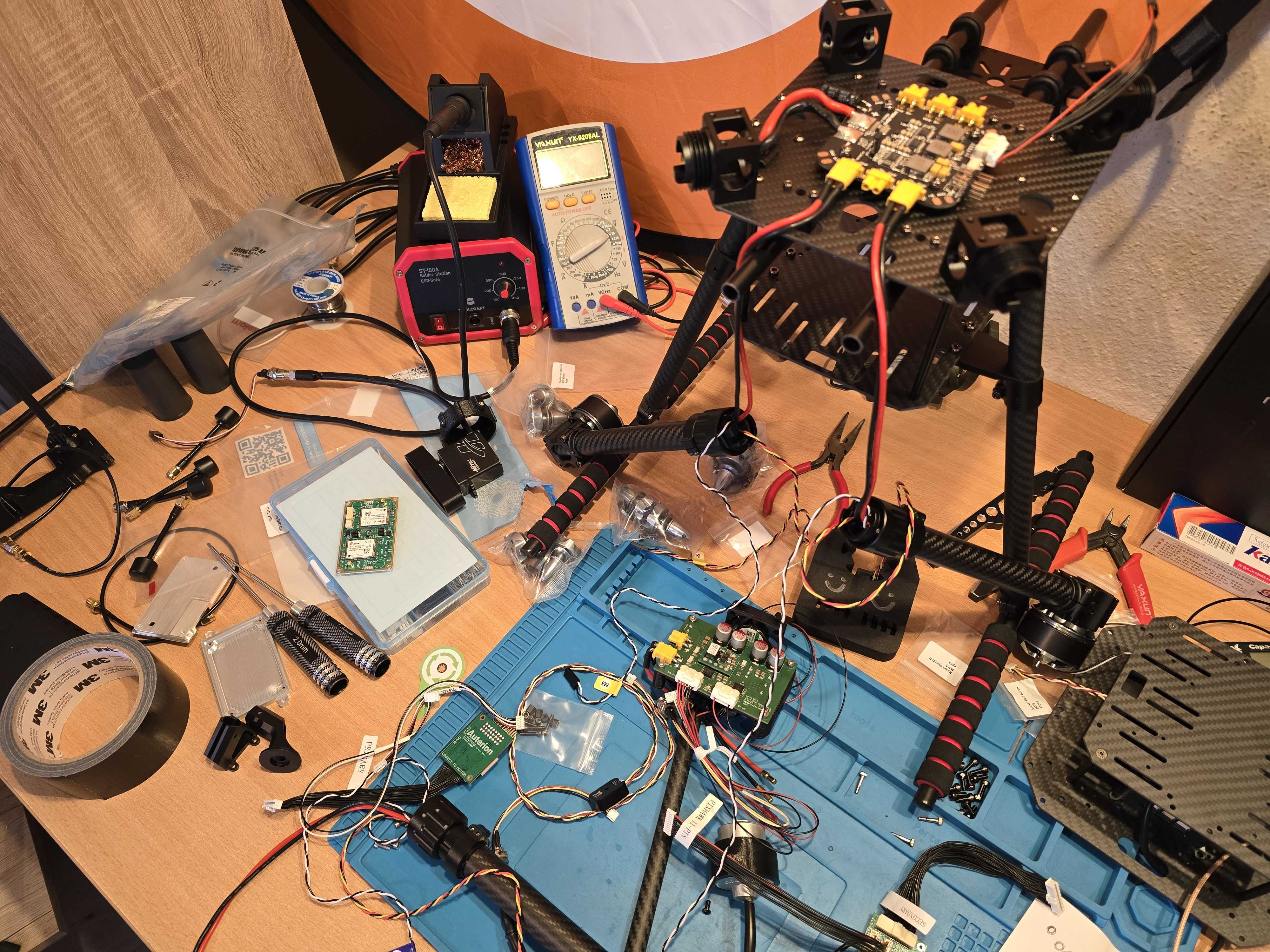
Every project in this timeline passed through some version of this workbench. What started as a basic soldering station grew project by project — gaining oscilloscopes, Raspberry Pis, motor controllers, dual screens, and full drone stacks in various states of assembly. The desk is a snapshot of whatever problem was being solved at the time: embedded firmware, avionics integration, or ROS 2 debugging.
.jpg)
.jpg)
.jpg)
.jpg)